苏州安塞尔机械有限公司
Suzhou Auncel Machinery Co., Ltd.
联系人:曹经理
手 机:13915777520
18136152978
电 话:0512-53835743
网 址:www.auncel.com.cn
邮 箱:auncelmachine@163.com
地 址:苏州市常熟市沙家浜镇北新路12号
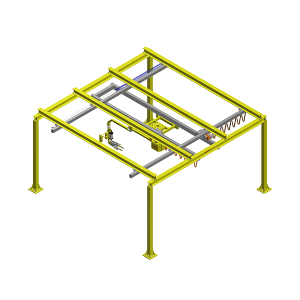
1、轨道行走系统:采用铝合金轨道与移动平台小车配合,平台小车连接硬臂式机械手。使整个设备在轨道行程内平稳行走。非金属滚轮采用高强度耐磨尼龙材料加工而成,使用寿命长。
2、机械手主机:a) 可实现不同重量物料的重力平衡状态,适用于物料的精确移载操作。助力机械手
b) 空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,便于精确定位。
c) 全程平衡、运动顺滑等特点,使得操作者可以很便捷地实现工件的搬运、定位、装配等操作。
d) 刚性手臂可使机械手带工件越过障碍;水平臂可满足物料在相关场所进行横向放入、横向取出等动作要求。
e) 系统可始终保持机械手头部的水平,发挥高作业性。
f) 关节刹车装置,具有多个回转关节,以实现广域范围内的物料取置;配备有刹车装置,操作者可在操作过程中随时中断机械手的运动。

3、夹具部分:主机控制与夹具(机械手)集成为一体,方便操作者双手控制工件。主机操作按钮都集成于夹具控制面板上,控制部分及指示灯、指示器等按人体工学原理布置,便于操作及紧急情况的处理。
4、执行部分:机械手上承担抓(或吸)取物件的机构,由手指、传力(或增力)机构和动力装置等组成。
手指是手部中直接承担抓(或吸)取物件的元件,手指抓取机能与手指、被抓取物件的关系手指抓取机能与手指、被抓取物件的关系
1、手指的抓取机能
助力机械手的手指的抓取机能是由被抓取物件和手指决定的。被抓取物件的大小、形状、重量、材质和受外力的约束程度及运动(抓取运动的物件)情况,决定了手指是的大小、形状、个数、种类配置和动作,而这些又决定了手指的抓取机能(即该手指能抓取的极限尺寸;手指对物件的约束和握紧程度;抓取精度-定位精度等)。
2、手指的种类
机械手的手指有机械式和吸盘式两种形式。人手抓取物件时,手指常与手掌相对握紧。机械式手指没有手掌,全靠手指握紧物件;而吸盘式手指则刚好相当于只有手掌吸附物件。机械式手指的应用比较广泛。
机械式手指常按指根的动作及手指的数目或手指的形状进行分类。